16F877A
PORTA gồm gồm 6 chân,các chân của Port
A, ta lập trình sẵn để rất có thể thực hiện tại đƣợc công dụng "hai chiều": xuất tài liệu từ vi tinh chỉnh và điều khiển ra nước ngoài vi cùng nhập dữ liệu từ ngoại vi vào vi điều khiển.
Bạn đang xem: Vi điều khiển pic 16f877a
bài toán xuất nhập tài liệu ở PIC 16F877A khác với bọn họ 8051. Ở toàn bộ các PORT của PIC16F877A, ở mỗi thời khắc chỉ thực hiện đƣợc một chức năng: xuất hoặc nhập. Để gửi từ chức năng này nhập qua tác dụng xuất tốt ngƣợc lại, ta buộc phải sử lý bởi phần mềm, ko nhƣ 8051 từ bỏ hiểu thời điểm nào là chức năng nhập, thời gian nào là tác dụng xuất.
vào kiền trúc hartware của PIC16F877A, ngƣời ta thực hiện thanh ghi TRISA ở địa chỉ cửa hàng 85H để điều khiển tính năng I/O trên. ý muốn xá lập những chân như thế nào của PORTA là nhập (input) thì ta phối bit tƣơng ứng chân kia trong thanh ghi TRISA. Ngƣợc lại hy vọng chân làm sao là output thì ta clear bit tƣơng ứng chân kia trong thanh ghi TRISA. Điều này trọn vẹn tƣơng tự so với các PORT còn lại.
Ngoài ra PORTA còn có các chức năng quan trọng sau :
Ngõ vào Analog của cục ADC: thực hiện công dụng chuyển tự Analog sang trọng Digital
Ngõ vào điện thế so sánh
Ngõ vào xung Clock của Timer0 trong kiến trúc phần cứng: thực hiện các trách nhiệm đếm xung trải qua Timer0…
Ngõ vào của bộ tiếp xúc MSSP (Master Synchronous Serrial Port)
PORTB gồm 8 chân, cũng nhƣ PORTA, các chân PORTB cũng thực hiện đƣợc
ghi TRISB.Khi mong chân làm sao của PORTB là đầu vào thì ta set bit tƣơng ứng trong thanh ghi TRISB, ngƣợc lại mong muốn chân làm sao là output đầu ra thì ta clear bit tƣơng ứng vào TRISB.
Thanh ghi TRISB còn đƣợc tích hợp bộ điện trở kéo lên rất có thể điều khiển đƣợc bởi chƣơng trình.
PORTC có 8 chân với cũng tiến hành đƣợc 2 tác dụng input cùng output dƣới sự điều khiển và tinh chỉnh của thanh ghi TRISC tƣơng từ bỏ nhƣ 2 thanh ghi bên trên
Ngoài ra PORTC còn tồn tại các chức năng quan trọng sau : Ngõ vào xung clock mang lại timer1 trong kiến trúc phần cứng
Bộ PWM thực hiện công dụng điều xung thiết kế đƣợc tần số,duty cycle : sử dụng trong điều khiển tốc độ và vị trí của cồn cơ…v.v
Tích hợp những bộ tiếp xúc nối tiếp I2C, SPI, SSP, USART
PORTD tất cả 8 chân,thanh ghi TRISD điều khiển và tinh chỉnh 2 tác dụng input cùng output
của PORTD tƣơng trường đoản cú nhƣ trên. PORTD cũng là cổng xuất dữ liệu của chuẩn giao tiếp song song PSP (Parallel Slave Port ).
PORTE có 3 chân. Thanh ghi tinh chỉnh và điều khiển xuất nhập tƣơng ứng là TRISE. Các
chân của PORTE gồm ngõ vào analog. Bên cạnh đó PORTE còn là các chân điều khiển và tinh chỉnh của chuẩn chỉnh giao tiếp PSP.
2.2.4. Nguyên nhân sử dụng PIC16F877A mà lại không dung 8051 cho đề tài
trong chƣơng trinh đào tạo của Trƣờng Đại Học tư thục Hải Phòng, em đƣợc học và thí nghiệm bên trên kit của vi tinh chỉnh 8051. Chúng ta vi điều khiển và tinh chỉnh 8051 là 1 trong những họ vi tinh chỉnh và điều khiển điển hình, phổ biến, dễ thực hiện và lập trình, rất phù hợp với sinh viên mới bắt đầu làm quen cho lập trình mang lại vi điều khiển. Mặc dù nhiên, cũng trong thừa trình nghiên cứu và thử nghiệm với các chip tinh chỉnh và điều khiển
thuộc họ 8051 ( điển hình là 89C51,89C52…), em nhận ra có hầu như nhƣợc điểm cơ bản sau phía trên :
Bộ lưu giữ RAM bao gồm dung lƣợng thấp, chỉ tất cả 128 bytes. Điều này khiến trở ngại lớn khi thực hiện các dự án công trình lớn cùng với vi điều khiển và tinh chỉnh 8051. Để khắc phục điều này ta phải không ngừng mở rộng thêm có tác dụng han chế số chân dành riêng cho các ứng dụng của vi điều khiển.
Số lƣợng các bộ tiếp xúc với ngoại vi đƣợc tích đúng theo sẵn vào 8051 ít, không có các cỗ ADC, PWM, truyền dữ liệu tuy vậy song….Khi hy vọng sử dụng các công dụng này, ta phải sử dụng thêm những IC mặt ngoài, tạo ttoons kém cùng khó tiến hành vì dễ dẫn đến nhiễu còn nếu như không biết giải pháp chống nhiễu tốt.
Ngoài ra còn một số trong những hạn chế nhƣ số lƣợng Timer của 8051 ít, chỉ gồm 2 timer. Bao gồm điều này làm cho giải thuật khi viết chƣơng trinh chạm mặt khó khăn.
Những nhƣợc điểm căn bản trên của 8051, em đã quyết định không cần sử dụng vi điều khiển này cho đế tài trang bị án của mình.
Với hy vọng dự trên gốc rễ kiến thức hấp thu đƣợc khi tham gia học vi điều khiển và tinh chỉnh 8051, em rất mong muốn tự bản thân tìm hiểu một bọn họ vi điều khiển và tinh chỉnh mới bạo phổi hơn, đầy đủ tính năng hơn nhằm trƣớc đôi mắt là phụa vụ ttots mang đến đồ án, sau nữa là cho các dự án trong tƣơng lai nếu như em tất cả dịp sử dụng vi điều khiển và tinh chỉnh trong dự án công trình của mình.
Trong quy trình tìm kiếm một bọn họ vi tinh chỉnh mới vừa lòng yêu ước nhƣ em đã trình bày trên. Em phân biệt PICcủa hang Microchip là một trong lựa chọn lý tƣởng. Chỉ việc xem xét qua những port và chức năng của các port nhưng mà em đã trình bày ở mục 2.2.3, ta cũng dễ dãi nhận ra rất nhiều ƣu điểm vƣợt trội của vi điều khiển này so với 8051.
Giá của PIC 16F877A mà em sở hữu trên thị trƣờng là 50000 đồng, đắt gấp 2 so với một con chip họ 8051. Việc sử dụng PIC 16F877A trong một đè tài bé nhỏ nhƣ đề tài của em hoàn toàn có thể là một lãng phí.Tuy nhiên cùng với mục đích nâng cao kiến thức, năng cao kỹ năng tự kiếm tìm tòi, học hỏi qua những kênh thong tin giáo
dục không giống nhau, nhằm ship hàng mục đích lâu dài sau này,thì đó là một lựa chọn trọn vẹn xác đáng. Cùng trên thực tế,trong một thời hạn tƣơng đối
ngắn,em đã nắm vững đƣợc hầu như mảng kiến thức và kỹ năng cơ bản nhất để áp dụng nó trong vấn đề của mình.
Trên trên đây là cục bộ nguyên do lý do em chon vi điều khiển PIC 16F877A mang đến đề tài đồ án của mình.
một trong những phần của tài liệu
Giới thiệu tổng quan lại về PIC 16F877A, tò mò PIC16F877A là gì, sơ vật dụng chân, tác dụng các chân, thông số kỹ thuật kỹ thuật, datasheet cùng nhiều thông tin hữu ích khác
Trong bài viết này, Điện Tử tương lai sẽ reviews cho chúng ta về PIC 16F877A. Đây là vi điều khiển và tinh chỉnh PIC được sử dụng phổ cập nhất vày tính linh động trong hoạt động, tính khả dụng với giá rẻ.
Bạn có thể tham khảo giá thành phầm tại đây vi điều khiển PIC16F877A
Điện Tử Tương Lai đã nhận được được không ít yêu cầu về PIC16F877a từ những sinh viên kỹ thuật vì vi tinh chỉnh và điều khiển PIC này được sử dụng nhiều trong số dự án kỹ thuật. Bởi vì vậy, kia là vì sao tại sao Điện Tử tương lai sẽ chia sẻ tất cả thông tin cụ thể về PIC16F877a.
PIC16F877A là gì

PIC16F877A là 1 Vi điều khiển và tinh chỉnh PIC 40 chân và được sử dụng phần đông trong các dự án và áp dụng nhúng. Nó có năm cổng bắt đầu từ cổng A đến cổng E. Nó có bố bộ định thời trong số ấy có 2 cỗ định thời 8 bit với 1 bộ định thời là 16 Bit. Nó hỗ trợ nhiều giao thức tiếp xúc như giao thức nối tiếp, giao thức song song, giao thức I2C. PIC16F877A cung ứng cả ngắt chân phần cứng và ngắt cỗ định thời.
Thông số nghệ thuật PIC16F877A
CPU | PIC 8 bit |
Cấu trúc | 8 |
Kích thước bộ nhớ lưu trữ chương trình (Kbyte) | 14 |
RAM (bytes) | 368 |
EEPROM/HEF | 256/HEF |
Số chân | 40 |
Tốc độ CPU về tối đa (MHz) | 20 |
Chọn chân nước ngoài vi (PPS) | Không |
Bộ tạo xê dịch bên trong | Không |
Số cỗ so sánh | 2 |
Số opamp | Không |
Số kênh ADC | 14 |
Độ phân giải ADC về tối đa (bit) | 10 |
ADC cùng với tính toán | Không |
Số bộ biến hóa DAC | 0 |
Độ phân giải DAC về tối đa | 0 |
Tham chiếu năng lượng điện áp nội bộ | Có |
Zero Cross Detect | Không |
Số cỗ định thời 8 bit | 2 |
Số cỗ định thời 16 bit | 1 |
Bộ định thời đo tín hiệu | 0 |
Bộ định thời số lượng giới hạn phần cứng | 0 |
Số áp ra output PWM | 0 |
Độ phân giải PWM tối đa | 10 |
Bộ định thời góc | Không |
Bộ tăng tốc toán học | Không |
Số module UART | 1 |
Số module SPI | 1 |
Số module I2C | 1 |
Số module USB | 0 |
Bộ định thời đo lường và thống kê có cửa sổ (WWDT) | Không |
CRC/Scan | Không |
Bộ tạo giao động được điều khiển và tinh chỉnh bằng số | 0 |
Cap. Touch Channels | 11 |
LCD phân đoạn | 0 |
Nhiệt độ hoạt động tối thiểu (* C) | -40 |
Nhiệt độ vận động tối đa (* C) | 125 |
Điện áp chuyển động tối thiểu (V) | 2 |
Điện áp chuyển động tối đa (V) | 5.5 |
Điện áp cao có thể | Không |
Sơ trang bị chân PIC16F877A
Hình dưới đấy là Sơ thiết bị chân PIC16F877A. Hình như còn tất cả bảng thông tin cụ thể đi kèm số vật dụng tự của chân, tên tương xứng và biểu hiện sơ lược về chân.
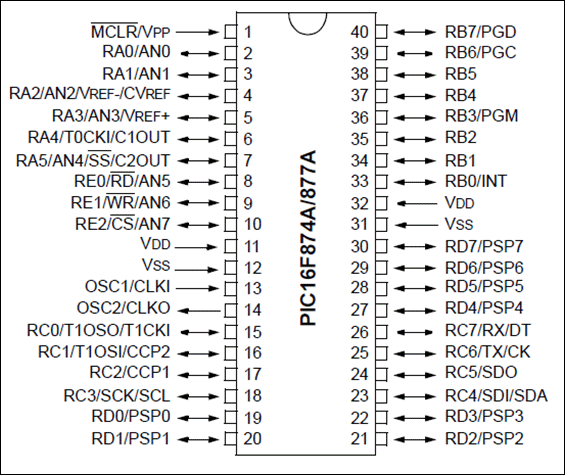
STT chân | Tên chân | Mô tả |
1 | MCLR / Vpp | MCLR được áp dụng trong quá trình lập trình, đa số được liên kết với programer như Pic |
2 | RA0 / AN0 | Chân analog 0 hoặc chân 0 của PORTA |
3 | RA1 / AN1 | Chân analog 1 hoặc chân 1 của PORTA |
4 | RA2 / AN2 / Vref- | Chân analog 2 hoặc chân 2 của PORTA |
5 | RA3 / AN3 / Vref + | Chân analog 3 hoặc chân 3 của PORTA |
6 | RA4 / T0CKI / C1out | Chân 4 của PORTA |
7 | RA5/AN4/SS/C2out | Chân analog 4 hoặc chân 5 của PORTA |
8 | RE0 / RD / AN5 | Chân analog 5 hoặc chân 0 của PORTE |
9 | RE1 / WR / AN6 | Chân analog 6 hoặc chân 1 của PORTE |
10 | RE2/CS/AN7 | Chân 7 của PORTE |
11 | Vdd | Chân nối đất của MCU |
12 | Vss | Chân dương của MCU (+5V) |
13 | OSC1 / CLKI | Bộ dao động phía bên ngoài / chân nguồn vào clock |
14 | OSC2 / CLKO  | Bộ dao động bên phía ngoài / chân nguồn vào clock |
15 | RC0 / T1OSO / T1CKI | Chân 0 của PORT C |
16 | RC1 / T1OSI / CCP2 | Chân 1 của POCTC hoặc chân Timer / PWM |
17 | RC2 / CCP1 | Chân 2 của POCTC hoặc chân Timer / PWM |
18 | RC3 / SCK / SCL | Chân 3 của POCTC |
19 | RD0 / PSP0 | Chân 0 của POCTD |
20 | RD1 / PSPI | Chân 1 của POCTD |
21 | RD2 / PSP2 | Chân 2 của POCTD |
22 | RD3 / PSP3 | Chân 3 của POCTD |
23 | RC4 / SDI / SDA | Chân 4 của POCTC hoặc chân Serial Data vào |
24 | RC5 / SDO | Chân 5 của POCTC hoặc chân Serial Data ra |
25 | RC6 / Tx / CK | Chân sản phẩm 6 của POCTC hoặc chân phân phát của Vi điều khiển |
26 | RC7 / Rx / DT | Chân sản phẩm 7 của POCTC hoặc chân thu của Vi điều khiển |
27 | RD4 / PSP4 | Chân 4 của POCTD |
28 | RD5/PSP5 | Chân 5 của POCTD |
29 | RD6/PSP6 | Chân 6 của POCTD |
30 | RD7/PSP7 | Chân 7 của POCTD |
31 | Vss | Chân dương của MCU (+5V) |
32 | Vdd | Chân nối khu đất của MCU |
33 | RB0/INT | Chân trang bị 0 của POCTB hoặc chân ngắt ngoài |
34 | RB1 | Chân lần đầu tiên của POCTB |
35 | RB2 | Chân thứ hai của POCTB |
36 | RB3/PGM | Chân vật dụng 3 của POCTB hoặc kết nối với programmer |
37 | RB4 | Chân đồ vật 4 của POCTB |
38 | RB5 | Chân thiết bị 5 của POCTB |
39 | RB6/PGC | Chân lắp thêm 6 của POCTB hoặc kết nối với programmer |
40 | RB7/PGD | Chân sản phẩm công nghệ 7 của POCTB hoặc liên kết với programmer |
Bạn có thể thấy trong hình trên những chân của Vi tinh chỉnh PIC có khá nhiều hơn một tên, bởi mỗi chân của PIC có thể thực hiện nhiều nhiệm vụ.
Ví dụ, Chân số 25, nó hoàn toàn có thể được thực hiện như một chân số 6 cổng C tiên tiến nhất (RC6) cùng cũng hoàn toàn có thể được sử dụng như một bộ phát (TX) cho tiếp xúc nối tiếp.
Vì vậy nó sẽ tùy nằm trong vào cách bạn có nhu cầu sử dụng từng chân. Trong bài hướng dẫn này họ sẽ kiểm tra đa số các tác dụng của chân.
Mạch cơ bạn dạng PIC16F877A
Mỗi vi tinh chỉnh PIC có một mạch cơ phiên bản và nếu khách hàng không xây dựng mạch cơ bản thì nó sẽ không hoạt động.
Nó hệt như cấp nguồn mang lại vi tinh chỉnh và điều khiển PIC với nó vận động ở mức + 5V.
Nếu bạn có nhu cầu bật quạt thì bạn sẽ làm gì? Bạn chỉ cần cung cấp điện đến nó với đó là mọi gì chúng ta sẽ có tác dụng với PIC cơ mà trong trường đúng theo của PIC, họ cũng cần hỗ trợ tần số nhưng nó đang hoạt động.
Chúng ta quan trọng kế mạch cơ phiên bản và mạch cơ phiên bản này đựng công suất cũng như tần số nhưng nó sẽ hoạt động.
Để cung cấp tần số mang đến vi điều khiển PIC, bọn họ sử dụng bộ dao động tinh thể và so với PIC 16F877a, bạn có thể sử dụng bộ xấp xỉ tinh thể dải tần từ bỏ 4MHz đến 40MHz.
Đây là Mạch cơ bạn dạng PIC16F877a cơ mà bạn quan trọng kế:
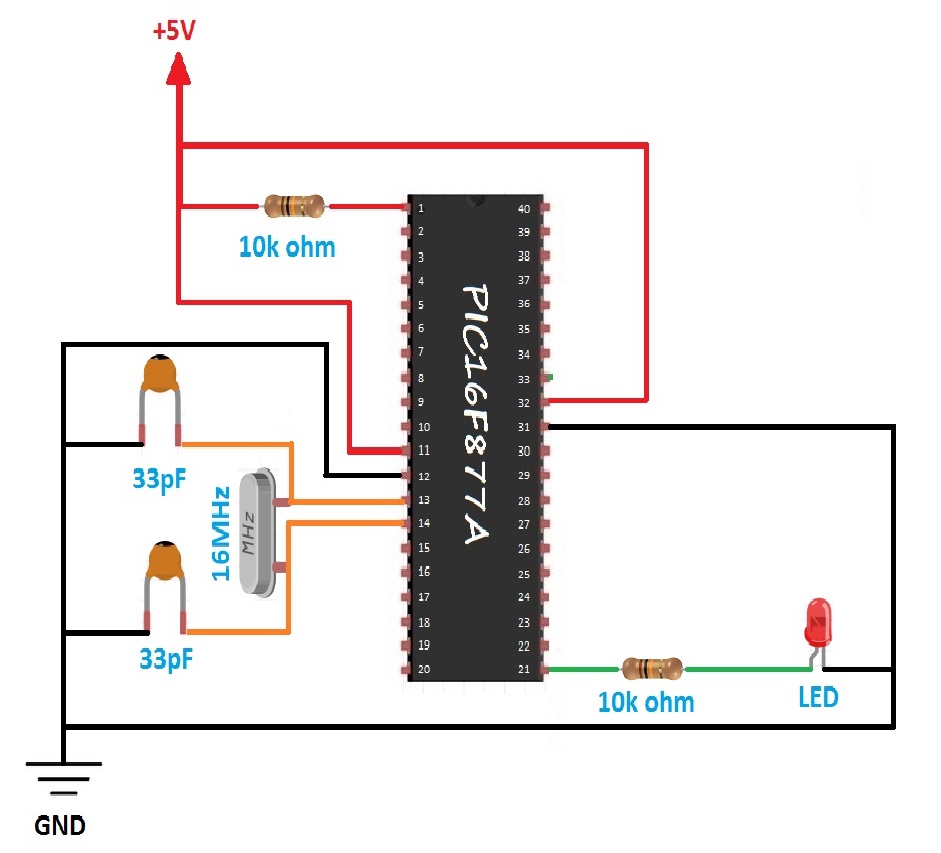
Giải thích mạch trên
Chân số 1: Chân này được call là MCLR (Master Clear) và họ cần cấp cho 5V mang lại chân này thông qua điện trở 10k-ohm.
Chân số 11 với chân số 32: các chân này được ký hiệu là Vdd nên bọn họ cũng bắt buộc cấp cho nó + 5V và bạn có thể thấy những đường này có red color trong hình trên.
Chân số 12 với chân số 31: các chân này là Vss, vày vậy chúng ta cấp GND (nối đất) tại chân này và những đường của nó bao gồm màu đen.
Chân số 13 cùng 14: những chân này được lấy tên là OSC1 (Bộ tạo xê dịch 1) với OSC2 (Bộ tạo dao động 2), hiện giờ chúng ta bắt buộc gắn cỗ tạo xê dịch tinh thể (16MHz) tại những chân này trên phố màu cam. Sau bộ dao động tinh thể, bọn họ có tụ năng lượng điện 33p
F và tiếp đến được nối đất.
Chúng ta đã xây cất mạch cơ bạn dạng và hiện nay vi tinh chỉnh PIC vẫn sẵn sàng chuyển động và chúng ta cũng có thể thấy một LED được gắn thêm ở chân số 21, đó là bởi vì chúng ta cũng cần được kiểm tra xem nó có đang làm việc hay không để chúng ta có thể bật hoặc tắt đèn led này.
Các cổng PIC16F877A
Trong mạch cơ bản, họ đã sử dụng toàn bộ các chân mối cung cấp của vi tinh chỉnh và điều khiển PIC, vào khi toàn bộ các chân cổng vẫn tồn tại chưa được sử dụng.
Vì vậy, hiện giờ khi họ đã cấp nguồn cho bộ vi điều khiển và tinh chỉnh PIC, điều tiếp theo họ cần có tác dụng là thiết kế một số code và sử dụng những cổng vi điều khiển và tinh chỉnh PIC. Đầu tiên họ hãy coi xét những Cổng PIC16F877a.
PIC16F877a có tổng cộng 5 Cổng là:
Cổng A: có tổng cộng 6 chân bắt đầu từ chân số 2 đến chân số 7. Các chân cổng A được ký kết hiệu từ RA0 đến RA5 trong những số đó RA0 là ký kết hiệu của chân trước tiên của Cổng A.
Cổng B: có tổng số 8 chân bắt đầu từ chân số 33 đến chân số 40. Những chân cổng B được ký kết hiệu tự RB0 mang đến RB7 trong các số đó RB0 là cam kết hiệu của chân thứ nhất của cổng B.
Cổng C: có tổng cộng 8 Chân. Các chân của nó không được thẳng mặt hàng với nhau. Bốn chân thứ nhất của cổng C nằm tại chân số 15 cho chân số 18, còn bốn chân ở đầu cuối nằm sinh sống chân số 23 mang lại chân số 26.
Xem thêm: Chuyện Bốn Phương : Tổng Hợp Những Câu Chuyện Thú Vị, Chuyện Lạ Bốn Phương
Cổng D: có tổng cộng 8 chân. Các chân của chính nó cũng ko thẳng hàng với nhau. Bốn chân đầu tiên của cổng D nằm tại vị trí chân số 19 mang lại chân số 22, trong những khi bốn chân ở đầu cuối nằm nghỉ ngơi chân số 27 mang đến chân số 30.
Cổng E: có tổng cộng 3 chân bắt đầu từ chân số 8 đến chân số 10. Các chân cổng E được cam kết hiệu từ bỏ RE0 đến RE2 trong đó RE0 là ký hiệu của chân thứ nhất của cổng E.
Trước hết hầu hết gì các bạn cần đưa ra quyết định là bạn có nhu cầu các chân cổng là đầu vào hay đầu ra.
Giả sử chúng ta có một số cảm biến và bạn muốn nhận giá trị của nó thì chúng ta phải kết nối cảm ứng này với vi điều khiển PIC. Trong trường hòa hợp này, chân PIC sẽ hoạt động như chân nguồn vào vì nó sẽ nhập giá trị từ cảm biến. Cảm biến gửi quý giá và PIC nhấn nó.
Trong trường hợp chúng ta có hộp động cơ DC và bạn muốn di hoạt động cơ DC đó bằng vi điều khiển PIC. Các bạn phải gửi lệnh từ cỗ vi điều khiển PIC đến động cơ DC để chân PIC chuyển động như chân đầu ra.
Mỗi cổng của vi tinh chỉnh và điều khiển PIC được links với nhị thanh ghi (register), ví dụ các thanh ghi cổng D là Port
D và TRISD.
Cả hai thanh ghi này đều phải có 8 bit bởi cổng D có 8 chân.
TRISD đưa ra quyết định cổng là cổng output hay nguồn vào và chúng ta cũng rất có thể gán giá trị mang đến từng chân riêng biệt biệt. Nếu bọn họ đã gán 0 thì nó đã là cổng output và nếu chúng ta đã gán 1 thì nó đang là đầu vào.
Ví dụ: nếu chúng ta gán TRISD = 0x01, thì 7 chân trước tiên của cổng D vẫn là cổng đầu ra nhưng chân sau cùng sẽ là đầu vào vì 0x01 là 00000001 trong hệ nhị phân.
Thanh ghi Port
D cất giá trị thực và giá trị này là sự phối kết hợp của toàn bộ 8 chân.
Trình biên dịch PIC16F877a
Trình biên dịch phê chuẩn của vi điều khiển và tinh chỉnh PIC là trình biên dịch MPLAB C18, bao gồm trên website chính thức của Microchip.
Chúng ta viết code trong trình biên dịch PIC và tiếp đến biên dịch nó. Sau khoản thời gian biên dịch, một tệp tin hex được chế tạo ra và bọn họ sẽ download lên trong bộ vi điều khiển PIC.
Cổng nối tiếp PIC16F877a
PIC16F877a gồm một cổng tiếp nối trong này được sử dụng để tiếp xúc dữ liệu.
Chân số 25 cũng hoạt động như TX do vậy nếu bạn muốn thực hiện giao tiếp nối tiếp thì nó sẽ được sử dụng nhằm gửi dữ liệu nối tiếp.
Chân 26 cũng chuyển động như RX, vì chưng vậy nếu bạn muốn thực hiện tiếp xúc nối tiếp thì nó sẽ được sử dụng để nhận dữ liệu nối tiếp.
Giao tiếp I2C PIC16F877a
PIC16F877a cũng đều có một cổng I2C có thể dễ dàng thực hiện tiếp xúc I2C.
Chân số 18 hoạt động như SCL, viết tắt của Serial Clock Line.
Chân số 23 hoạt động như SDA, là chữ viết tắt của Serial Data Line.
Bây giờ chúng ta cũng có thể thấy họ có cổng tiếp nối và cổng I2C trong cổng C, do vậy bạn có thể sử dụng cổng C như một cổng đơn giản nhưng cũng hoàn toàn có thể thực hiện tại hai tiếp xúc này với các chân của nó, vì chưng vậy nó hoàn toàn dựa vào vào lập trình sẵn viên.
Ngắt PIC16F877a
PIC16F877a có tổng cộng 8 mối cung cấp ngắt. Mối cung cấp ngắt là một vài sự kiện tạo nên ngắt, nguồn này hoàn toàn có thể là cỗ đếm thời hạn như các ngắt được sinh sản sau từng 1 giây hoặc cũng rất có thể là sự kiện biến đổi trạng thái chân, chẳng hạn như nếu tinh thần chân bị biến đổi sau đó ngắt sẽ tiến hành tạo ra.
Vì vậy, ngắt PIC16F877a hoàn toàn có thể được tạo nên bằng 8 phương pháp sau:
Ngắt ngoài.Ngắt cỗ định thời (Timer0 / Timer1).Thay đổi trạng thái cổng B.Cổng Slave song song Đọc / Ghi.Bộ chuyển đổi A / D.Nhận / Truyền nối tiếp.PWM (CCP1 / CCP2).Thao tác ghi EEPROM.









{kind=link}